



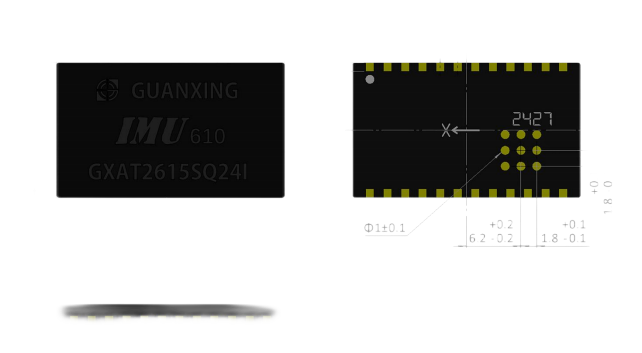




表1 物理特性
产品 | 描述 |
尺寸 | 26×15.2×2.7mm3 |
重量 | 2.2g |
防护等级 | QFN-24 |
封装材料 | 办结晶高分子材料 |
制作工艺 | 集成 |
输出信号 | 数字型 |
表2 电气连接
描述 | |
工作电压 | 3.3V |
工作电流 | 10mA |
额定功率 | 33mW |
功能接口 | UART、SPI、CAN |
表3 环境可靠性
产品 | 严酷等级 |
振动强度 | X和Y轴,10-1000Hz,100m/s2;Z轴,10-1000Hz,100m/s2 |
冲击强度 | 峰值加速度19600m/s2,标称脉冲持续时间0.5ms,速度变化量:半正弦波3.4m/s,后峰锯齿波2.7m/s,梯形波4.9m/s |
温度环境 | 工作温度:-40-105℃ 存储温度:-40-125℃ |
湿度环境 | -10℃-65℃,相对湿度45%-96% |
快速温变 | -40℃-85℃,温度变化速率(15+3)K/min |
表4 电磁兼容性
静电放电抗扰度 | 电磁辐射抗扰度 | 沿电源线瞬态传导 |
等级4级,性能判据B | 场强50V/M,1米法,性能判据A | 等级Ⅲ级,性能判据B |
表5 系统性能参数
指标 | 参数 | |
系统启动时间 | 0.3s | |
输出数据 | 航向角(IMUi611)、俯仰角、横滚角、倾斜角 加速度、角速度 | |
动态范围 | Yaw:0~360°;Pitch:-90~+90°;Roll:-180~+180° Tilt:-90~+90° | |
加速度量程 | ±2g/4g/8g/16g | |
角速度量程 | ±250/500/1000/2000dps | |
静态精度(俯仰/横滚/倾斜) | 0.02deg | |
静态精度(航向) | 0.01deg(6轴算法,无初始对准,需GNSS辅助) | |
动态精度(俯仰/横滚/倾斜) | 0.5deg | |
动态精度(航向) | 0.1deg(6轴算法,无初始对准,需GNSS辅助) | |
角度分辨率 | 0.0001deg | |
最大更新率 | 100Hz | |
陀螺仪 | 总噪声 | 0.05°/s @RMS |
角度随机游走(10Hz) | 0.005°/s/√Hz | |
零偏不稳定性(10s) | 8°/h(Allan方差) | |
非线性 | 0.2% | |
最大更新速率 | 1000Hz | |
加速度计 | 灵敏度随温度变化率 | ±0.02%/℃ |
加速度随机游走(10Hz) | 400㎍/√Hz
| |
零偏不稳定性 | 100µg(Allan方差) | |
非线性 | 0.5% | |
最大更新速率 | 1000Hz | |
表6稳定性性能参数
指标 | 航向角 | 俯仰角 |
时间漂移 | 0.01°/h | 0.001°/h |
温度漂移 | 0.01°/℃ | 0.001°/℃ |
| 横滚角 | 倾斜角 |
时间漂移 | 0.001°/h | 0.009°/h |
时间漂移 | 0.001°/℃ | 0.007°/℃ |
表7 线性性能参数
指标 | 角速度 | 加速度 |
启动时间 | 100ms | 100ms |
维度 | 三轴 | 三轴 |
ADC位数 | 16Bit | 16Bit |
最小量程 | ±250dps | ±2g |
满量程 | ±2000dps | ±16g |
分辨率(最小量程时) | 131LSB/(°/s) | 16384LSB/g |
分辨率(满量程时) | 16.4 LSB/(°/s) | 2048 LSB/g |
表8 各模块量程及对应分辨率
模块种类 | 量程 | 分辨率 |
三轴加速度 | ±2g | 16384 LSB/g |
±4g | 8192LSB/g | |
±8g | 4096LSB/g | |
±16g | 2048LSB/g | |
三轴角速度 | ±250dps | 131 LSB/(dps) |
±500dps | 65.5 LSB/(dps) | |
±1000dps | 32.8 LSB/(dps) | |
±2000dps | 16.4 LSB/(dps) |
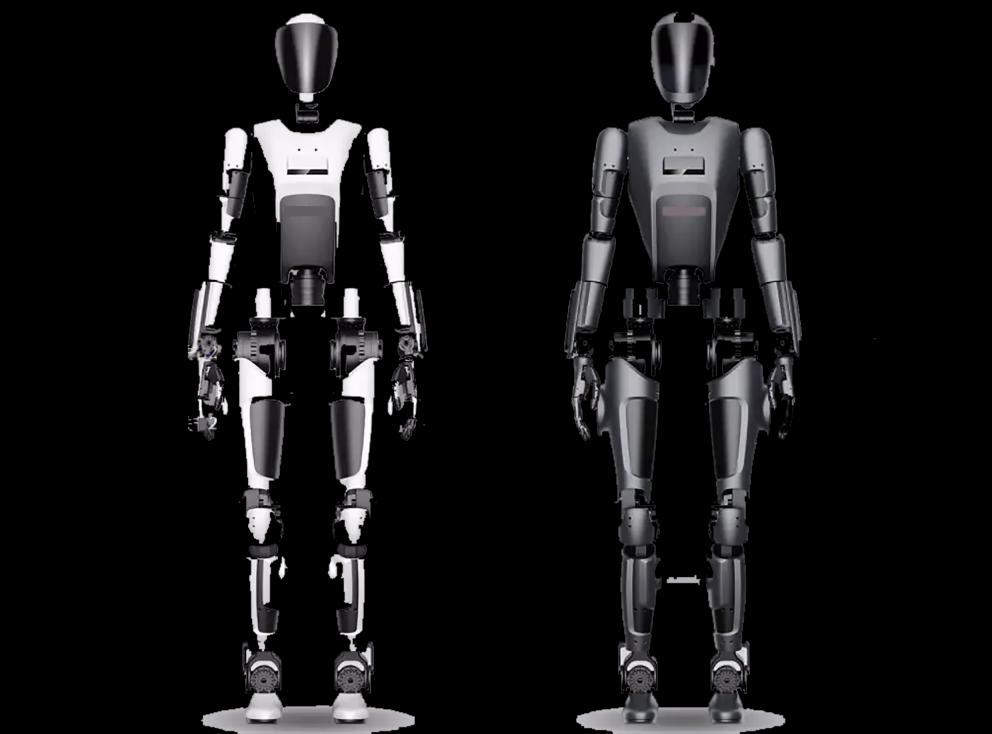
2人形机器人自由度关节姿态控
3、运动康复器械控制系统












