核心技术优势:
* 全生命周期算法。在传感器设计、制造、使用全过程中实现算法保障。
* 实时航向修正算法。克服复杂交变磁场环境影响,保持惯性导航精度。
* 半椭球插值自动校准技术。消除陀螺仪积分累积误差,实现传感器自动校准。
* 微系统芯片设计与制造。首创异构融合微系统芯片,实现工业传感器微型化。
* 半结晶高温高速低压封装技术。传感器具有更好的抗振动冲击、耐候性与防护性。
* 自动化标定技术。自研仿真测试系统与标定设备,实现传感器自动化标定。
表1 物理特性
产品 | 描述 |
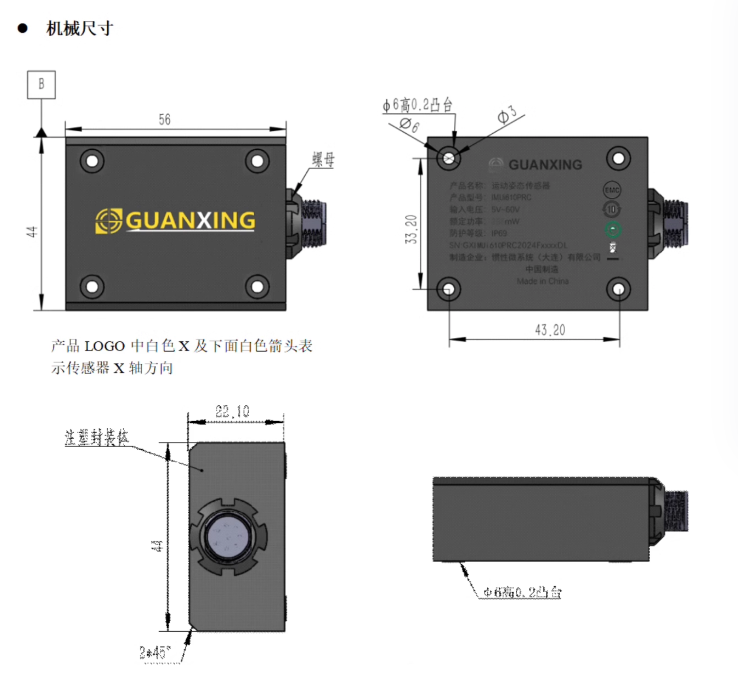
尺寸 | 56×44×22.1mm3 |
重量 | 90g |
防护等级 | IP69 |
封装材料 | 高分子材料 |
制作工艺 | 一体一次成型 |
输出信号 | 数字型 |
表2 电气连接
描述 | |
工作电压 | 5~60V |
工作电流 | 24 mA(12V) |
额定功率 | 288mW |
功能接口 | RS232、CAN |
表3 环境可靠性
产品 | 严酷等级 |
振动强度 | X和Y轴,10-1000Hz,500m/s2;Z轴,10-1000Hz,500m/s2 |
冲击强度 | 峰值加速度98000m/s2,标称脉冲持续时间0.3ms,速度变化量:半正弦波3.4m/s,后峰锯齿波2.7m/s,梯形波4.9m/s |
温度环境 | 工作温度:-40-105℃ 存储温度:-40-125℃ |
湿度环境 | -10℃-65℃,相对湿度45%-96% |
快速温变 | -40℃-85℃,温度变化速率(15+3)K/min |
表4 电磁兼容性
静电放电抗扰度 | 电磁辐射抗扰度 | 沿电源线瞬态传导 |
等级4级,性能判据B | 场强50V/M,1米法,性能判据A | 等级Ⅲ级,性能判据B |
表5 系统性能参数
指标 | 参数 | |
系统启动时间 | 0.3s | |
输出数据 | 航向角(IMUi611PRC)、俯仰角、横滚角、倾斜角 加速度、角速度 | |
动态范围 | Yaw:0~360°;Pitch:-90~+90°;Roll:-180~+180° Tilt:-90~+90° | |
加速度量程 | ±2g/4g/8g/16g | |
角速度量程 | ±250/500/1000/2000dps | |
静态精度(俯仰/横滚/倾斜) | 0.02deg | |
静态精度(航向) | 0.01deg(6轴算法,无初始对准,需GNSS辅助) | |
动态精度(俯仰/横滚/倾斜) | 0.5deg | |
动态精度(航向) | 0.1deg(6轴算法,无初始对准,需GNSS辅助) | |
角度分辨率 | 0.0001deg | |
最大更新率 | 100Hz | |
陀螺仪 | 总噪声 | 0.05°/s @RMS |
角度随机游走(10Hz) | 0.005°/s/√Hz | |
零偏不稳定性(10s) | 8°/h(Allan方差) | |
非线性 | 0.2% | |
最大更新速率 | 1000Hz | |
加速度计 | 灵敏度随温度变化率 | ±0.02%/℃ |
加速度随机游走(10Hz) | 400㎍/√Hz
| |
零偏不稳定性 | 100µg(Allan方差) | |
非线性 | 0.5% | |
最大更新速率 | 1000Hz | |
表6稳定性性能参数
指标 | 航向角 | 俯仰角 |
时间漂移 | 0.01°/h | 0.001°/h |
温度漂移 | 0.01°/℃ | 0.001°/℃ |
| 横滚角 | 倾斜角 |
时间漂移 | 0.001°/h | 0.009°/h |
时间漂移 | 0.001°/℃ | 0.007°/℃ |
表7 线性性能参数
指标 | 角速度 | 加速度 |
启动时间 | 100ms | 100ms |
维度 | 三轴 | 三轴 |
ADC位数 | 16Bit | 16Bit |
最小量程 | ±250dps | ±2g |
满量程 | ±2000dps | ±16g |
分辨率(最小量程时) | 131LSB/(°/s) | 16384LSB/g |
分辨率(满量程时) | 16.4 LSB/(°/s) | 2048 LSB/g |
表8 各模块量程及对应分辨率
模块种类 | 量程 | 分辨率 |
三轴加速度 | ±2g | 16384 LSB/g |
±4g | 8192LSB/g | |
±8g | 4096LSB/g | |
±16g | 2048LSB/g | |
三轴角速度 | ±250dps | 131 LSB/(dps) |
±500dps | 65.5 LSB/(dps) | |
±1000dps | 32.8 LSB/(dps) | |
±2000dps | 16.4 LSB/(dps) |
产品组成:
(1)传感器主体(1 个);
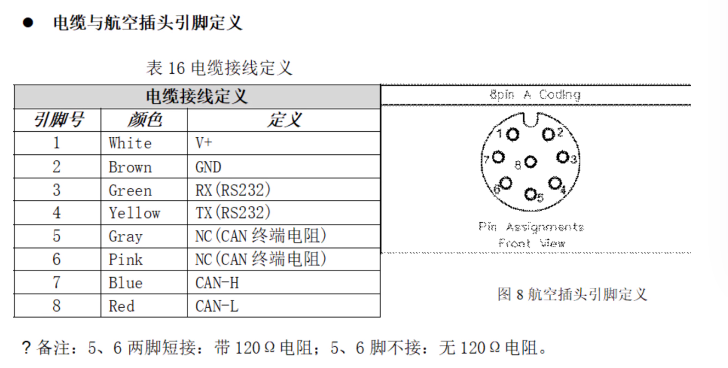
(2)航空插头(Φ12,8pin,与传感器主体一体封装)
(3)电源、信号输入输出航空屏蔽线(Φ12,8pin,1米)。
(4)固定螺栓,(M3,4个)。
(5)内六角安装螺栓、螺母、弹垫、垫片(4个)
(6)内六角扳手 (1个)。
* 传输速率
(1)RS232总线,波特率默认为 115200B;
(2)CAN 总线,波特率默认为500kbps
(3)电缆长度和线束端接口可根据客户要求定制。

即插型姿态航向传感器IMUi610/611PRC设备能够实时描述物体的运动姿态,可以应用于无人矿机/农机姿态控制与组合导航、工业设备倾角测量、波浪补偿与平台稳定、大型机器人姿态控制与组合导航等方面。
由于矿区和农田环境恶劣,司机从业意愿低,招工难、管理难,人工费高,而且矿机/农机车型大、盲区多,操作复杂,因而司机作业易疲劳,常发生安全生产事故。近年来无人驾驶的矿机/农机逐渐成为主流。运动姿态传感器能够描述机械运动的空间姿态,为无人驾驶矿机/农机提供稳定的位置、速度和姿态信息,与RTK技术(实时动态定位技术)结合,可以将定位精度从米级提升到厘米级,显著提升了无人驾驶矿机/农机的导航精准性。


2工业设备倾角测量
工业设备倾角测量的主要应用场景包括桥梁架设、铁路铺设、土木工程、建筑工程、石油钻井、航空航海、工业自动化、智能平台和机械加工等领域。运动姿态传感器在这些领域中用于测量系统的水平角度变化,确保设备的稳定性和安全性。
图2倾角测量
2.3大型机器人姿态控制与组合导航
目前机器人在很多领域已经完成了人类不能参与的工作,比如在恶劣的环境,大载重、重复性工作以及人类不能到达的狭窄区域和危险的工作等。运动姿态传感器可以用来监测机器人的平衡、力臂运行等运动姿态,从而通过控制系统调节其运动;与其它导航方式形成组合导航系统,保障导航的连续性与稳定性。



图3大型机器人
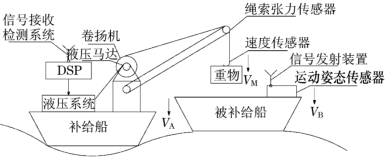
2.4波浪补偿与平台稳定
波浪补偿旨在减少海上作业中波浪对起重设备的影响,确保作业的稳定性和安全性。它主要通过运动姿态传感器探测波浪运动,并通过补偿装置抵消这些运动,从而保持负载的稳定。主动式波浪补偿(AHC)通过动力执行器主动抵消运动姿态传感器检测到的运动,具有高精度和实时响应的特点,这种技术广泛应用于船舶和海上平台上的起重设备。